自动驾驶技术路线探究 - 第一阶段报告
本文最后更新于:9 天前
作者SunistC: 由于公司保密协议要求,本报告大部分内容均已删减,并且后续报告不再发表。
Background
1. Architectures of Autonomous Vehicle
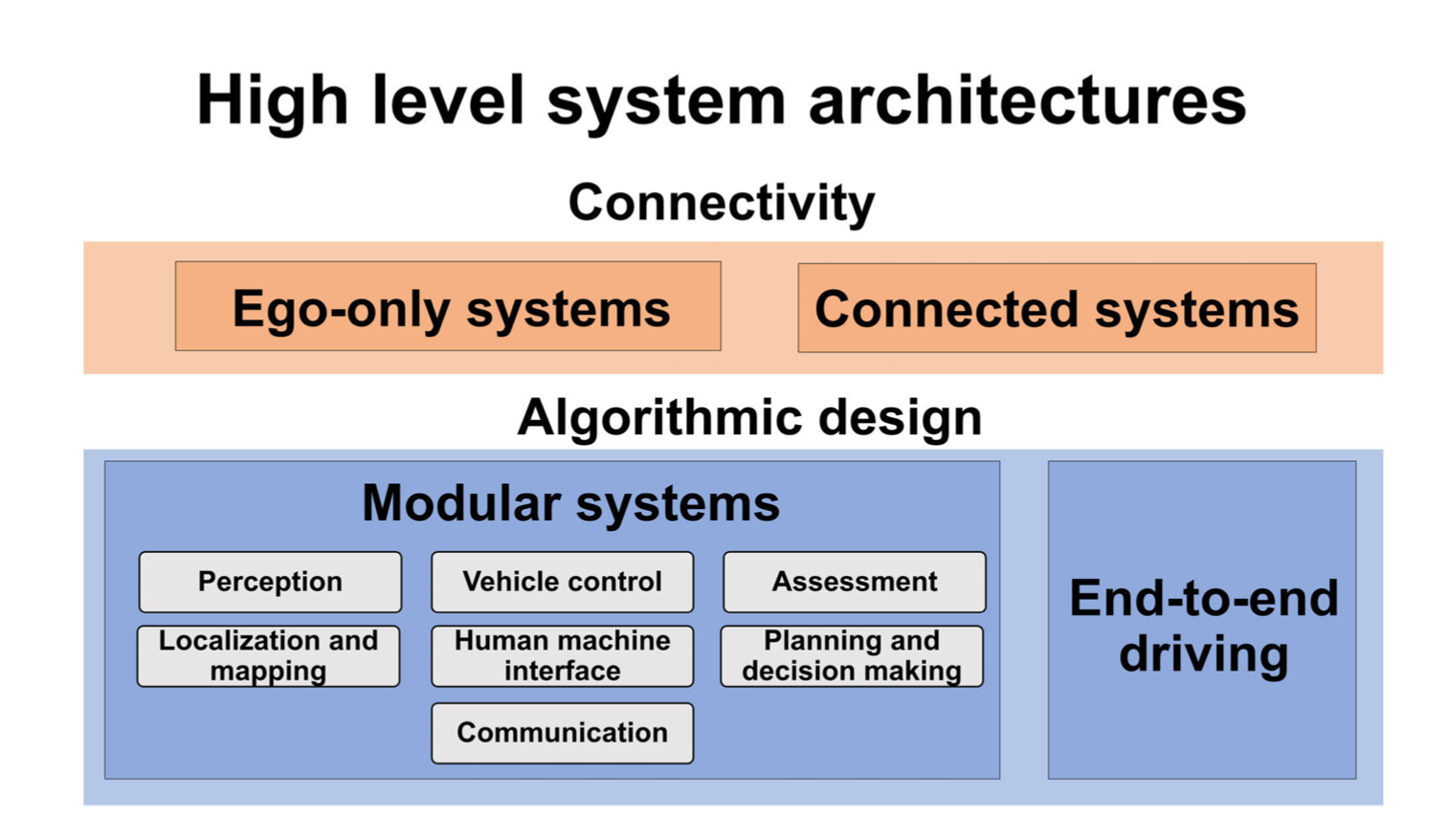 Figure-1: 自动驾驶系统体系结构的高级分类[10]
Figure-1: 自动驾驶系统体系结构的高级分类[10]自动驾驶汽车的感知系统一般由相机,激光雷达,声波雷达,定位设备等四类设备[3]组成。
 Figure-2: 自动驾驶汽车的结构
Figure-2: 自动驾驶汽车的结构其中的常见设备感知范围与视野资料如下:
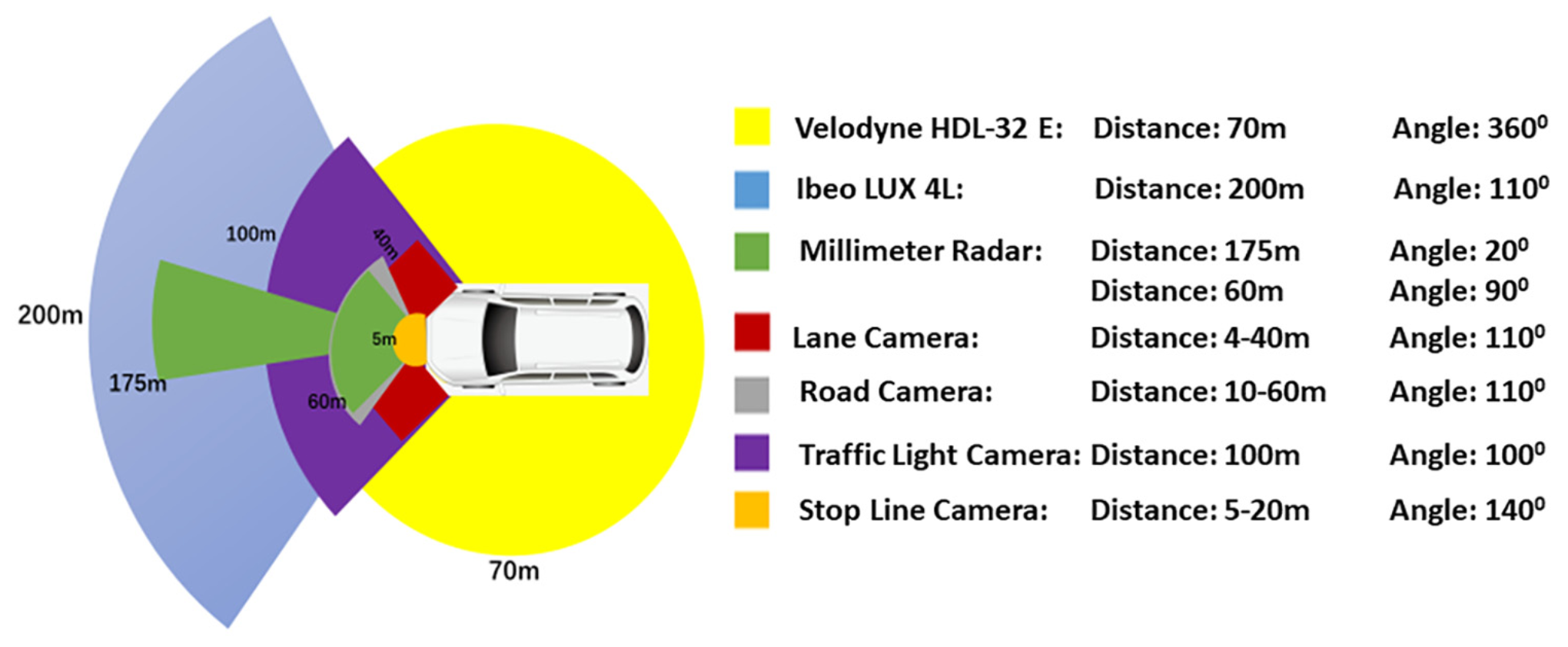 Figure-3: 常见感知设备感知参数[3]
Figure-3: 常见感知设备感知参数[3]其感知距离多在$5 \sim 100$米,感知视野多在$90^\circ \sim 120^\circ$。同时,下表类比了各类设备的异同:
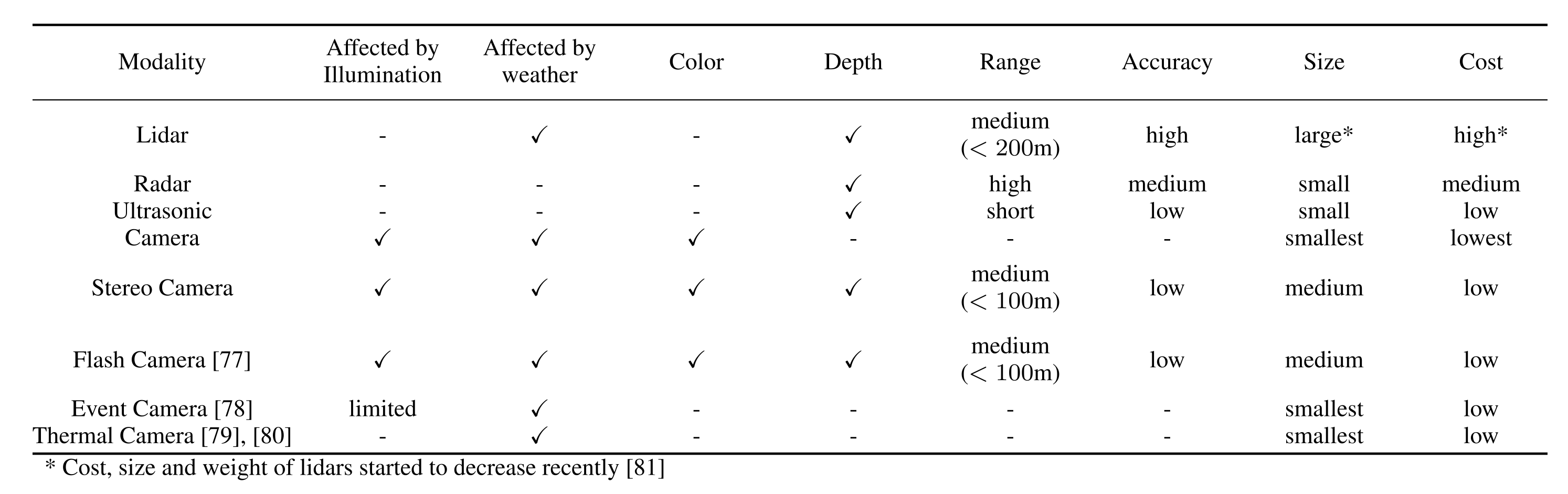 Table-1: 各类传感器的类比[16]
Table-1: 各类传感器的类比[16]安全
自动驾驶汽车在近期的测试中出现了大量的事故,谷歌的汽车在行驶中因为无法辨别一辆公共汽车的速度,与其发生了碰撞[11],特斯拉的汽车将白色卡车识别为天空二发生碰撞[12],百度的汽车在行驶过程中无法辨认障碍物而发生碰撞[14],这一系列事故使得公众与社会对自动驾驶汽车驾驶的安全性要求极高,尤其是在中国大陆,对自动驾驶汽车不安全的容忍度仅为其余主流国家的$50\%$[13]。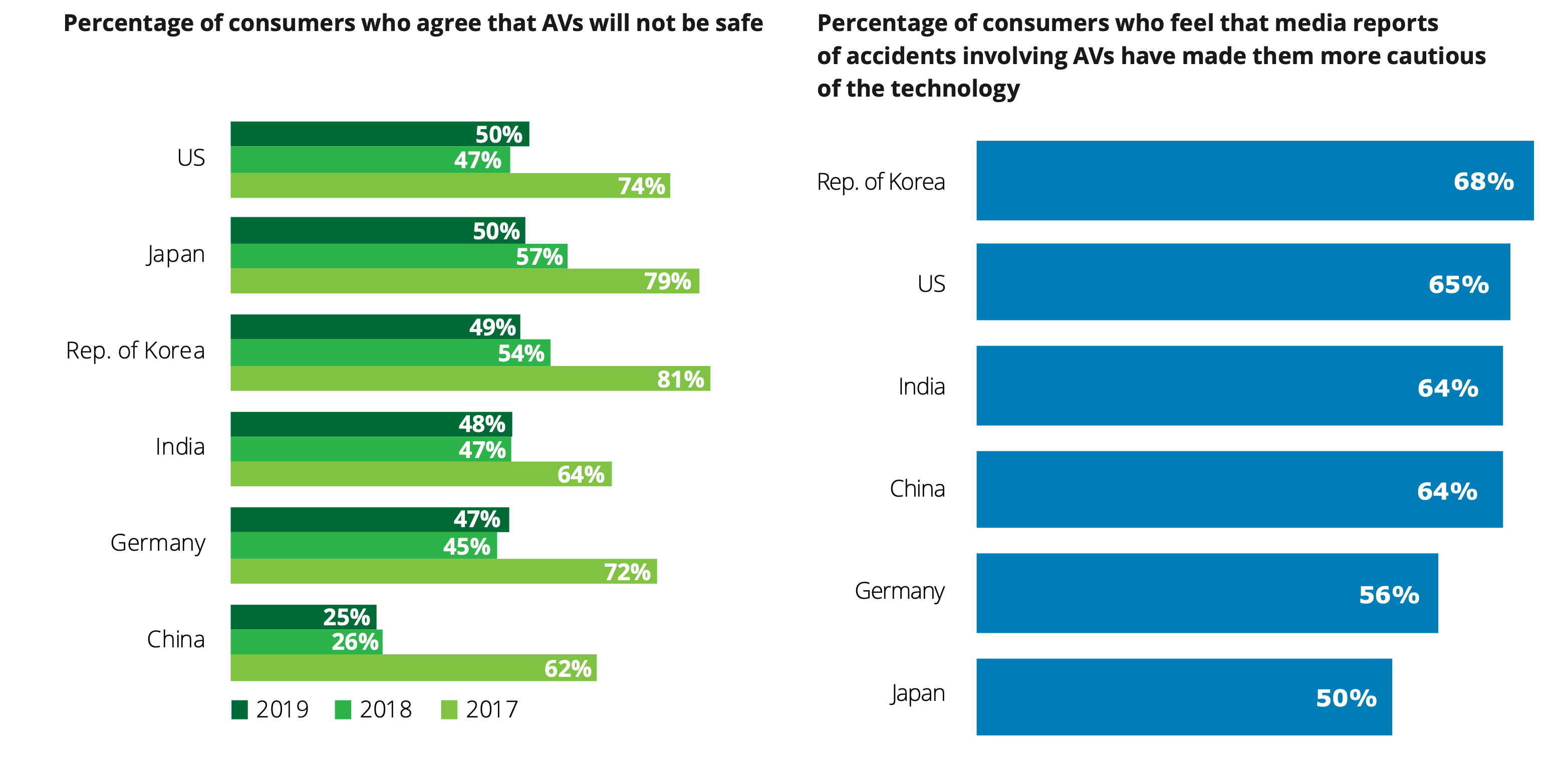 Figure-4: 关于自动驾驶汽车安全性的市场调研
Figure-4: 关于自动驾驶汽车安全性的市场调研并且自动驾驶汽车所造成的事故在大多数情况下是可能致命的,所以自动驾驶系统需要设计较大的冗余度以降低灾难性故障,但同时这也对系统的调度难度与鲁棒性提出了新的挑战。
Tesla Mode
Features
Advantages
Disadvantages
Prospect
Huawei Mode
Features
Advantages
Disadvantages
Prospect
References
- Oh C, Yoon J. Hardware acceleration technology for deep-learning in autonomous vehicles[C] 2019 IEEE International Conference on Big Data and Smart Computing (BigComp). IEEE, 2019: 1-3. ↩
- Welling E and Oppelt M. Convolutional neural networks in autonomous vehicle control systems, 2017 ↩
- Zhou Z, Akhtar Z, Man K L, et al. A deep learning platooning-based video information-sharing Internet of Things framework for autonomous driving systems[J]. International Journal of Distributed Sensor Networks, 2019, 15(11): 1550147719883133. ↩
- 尉志青, 马昊, 张奇勋, 等. 感知-通信-计算融合的智能车联网挑战与趋势[J]. 中兴通讯技术, 2020, 1. ↩
- 王科俊, 赵彦东, 邢向磊. 深度学习在无人驾驶汽车领域应用的研究进展[J]. 智能系统学报, 2018, 13(1): 55-69. ↩
- 小马智行PonyAI. 1小时实录:广州高峰期1小时全自动驾驶,无人类干预[Online]. 哔哩哔哩弹幕网, 2021, 3. Available: https://www.bilibili.com/video/BV19p4y1h7KP ↩
- Endsley M R. Autonomous driving systems: A preliminary naturalistic study of the Tesla Model S[J]. Journal of Cognitive Engineering and Decision Making, 2017, 11(3): 225-238. ↩
- Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: Common practices and emerging technologies[J]. IEEE access, 2020, 8: 58443-58469. ↩
- Gold C, Körber M, Lechner D, et al. Taking over control from highly automated vehicles in complex traffic situations: the role of traffic density[J]. Human factors, 2016, 58(4): 642-652. ↩
- Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: Common practices and emerging technologies[J]. IEEE access, 2020, 8: 58443-58469. ↩
- A. Davies. Google’s Self-Driving Car Caused Its First Crash. Accessed: Dec. 16, 2018. [Online]. Available: https://www.wired.com/2016/02/googles-self-driving-car-may-caused-first-crash ↩
- M. McFarland. Who’s Responsible When an Autonomous Car Crashes? Accessed: Jun. 4, 2019. [Online]. Available: https://money.cnn.com/2016/07/07/technology/tesla-liability-risk/index.html ↩
- Deloitte. 2019 Deloitte Global Automotive Consumer Study— Advanced Vehicle Technologies and Multimodal Transportation, Global Focus Countries. Accessed: May 19, 2019. [Online]. Available: https://www2.deloitte.com/content/dam/Deloitte/us/Documents/manufacturing/us-global-automotive-consumer-study-2019.pdf ↩
- 一鹿有车. 干翻特斯拉?百度Apollo自动驾驶体验[Online]. 哔哩哔哩弹幕网, 2021, 4. Available: https://www.bilibili.com/video/BV1bK4y1P7Ba ↩
- Arnold E, Al-Jarrah O Y, Dianati M, et al. A survey on 3d object detection methods for autonomous driving applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3782-3795. ↩
- T. B. Lee. How 10 Leading Companies Are Trying To Make Powerful, Low-Cost Lidar. Accessed: May 19, 2019. [Online]. Available: https://arstechnica.com/cars/2019/02/the-ars-technica-guide-to-the-lidar-industry ↩
- Suhr J K, Jang J, Min D, et al. Sensor fusion-based low-cost vehicle localization system for complex urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(5): 1078-1086. ↩
- Hata A, Wolf D. Road marking detection using LIDAR reflective intensity data and its application to vehicle localization[C] 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE, 2014: 584-589. ↩
- Gruyer D, Belaroussi R, Revilloud M. Accurate lateral positioning from map data and road marking detection[J]. Expert Systems with Applications, 2016, 43: 1-8. ↩
- Qu X, Soheilian B, Paparoditis N. Vehicle localization using mono-camera and geo-referenced traffic signs[C] 2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015: 605-610. ↩
- Ort T, Paull L, Rus D. Autonomous vehicle navigation in rural environments without detailed prior maps[C] 2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2018: 2040-2047. ↩
- Wolcott R W, Eustice R M. Visual localization within lidar maps for automated urban driving[C] 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2014: 176-183. ↩
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!